Multi-Camera Vision & Point Cloud Experiments
Personal experiments with multi-camera vision, depth sensing, point cloud alignment, calibration, and spatial measurement workflows.
Related categories
Multi-Camera Vision & Point Cloud Experiments
This project area explores practical machine vision using multiple camera viewpoints, depth sensing, and 3D point cloud processing.
The focus is on understanding how camera position, calibration, lighting, field of view, and data filtering affect usable measurement results. Work in this area includes experiments with depth cameras, multi-camera alignment, visualization, and extracting useful geometric information from noisy real-world data.
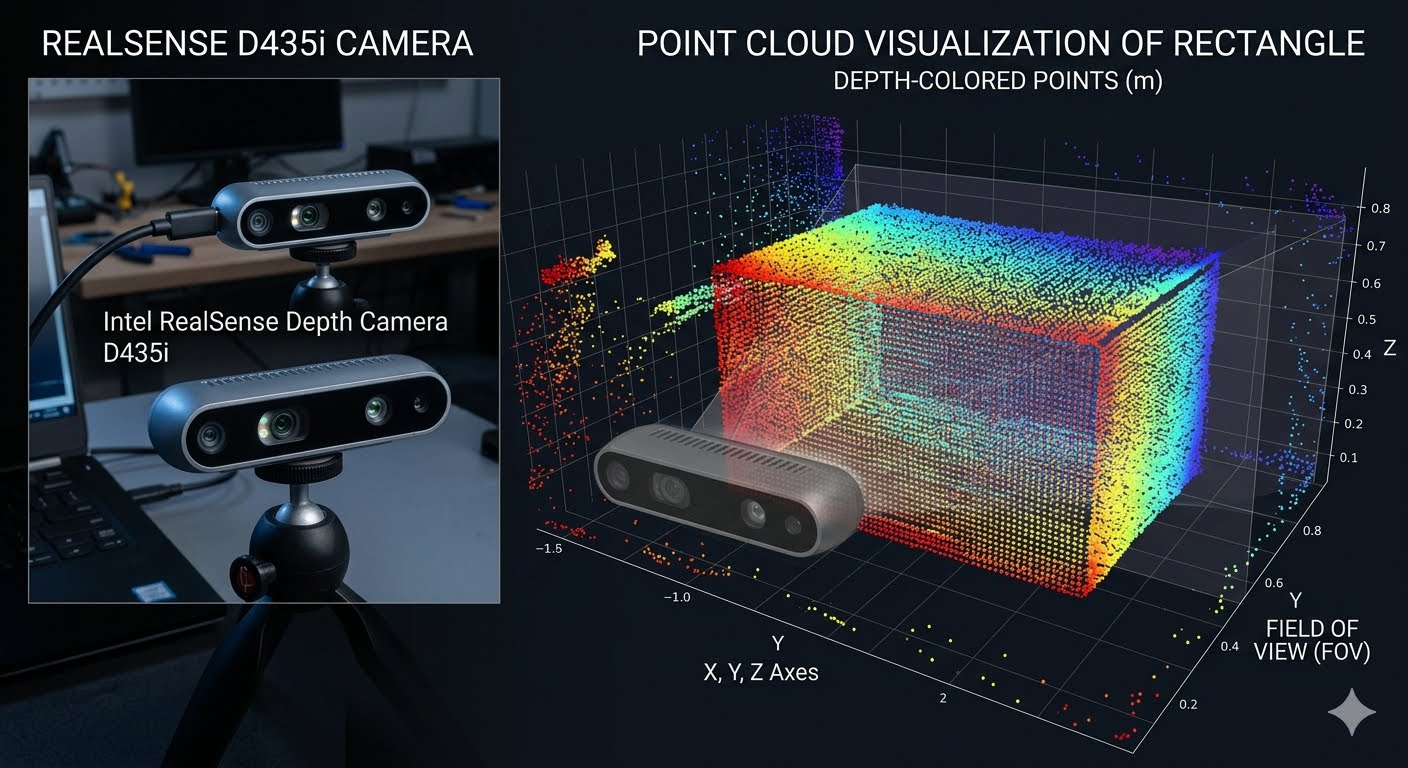
Depth-sensing hardware like this gives the experiments a useful reality check: calibration and filtering decisions look very different once real surfaces, lighting, and noisy data are involved.
Current Interests
- Combining multiple camera viewpoints
- Aligning point clouds into a shared coordinate space
- Understanding calibration drift and camera placement limits
- Visualizing 3D data clearly
- Filtering noise from depth data
- Detecting planes, edges, boundaries, and height features
- Comparing practical accuracy against real-world measurement needs
The recurring theme is practical vision-system thinking: camera placement, calibration behavior, measurement limits, and ways to reason about noisy spatial data.